
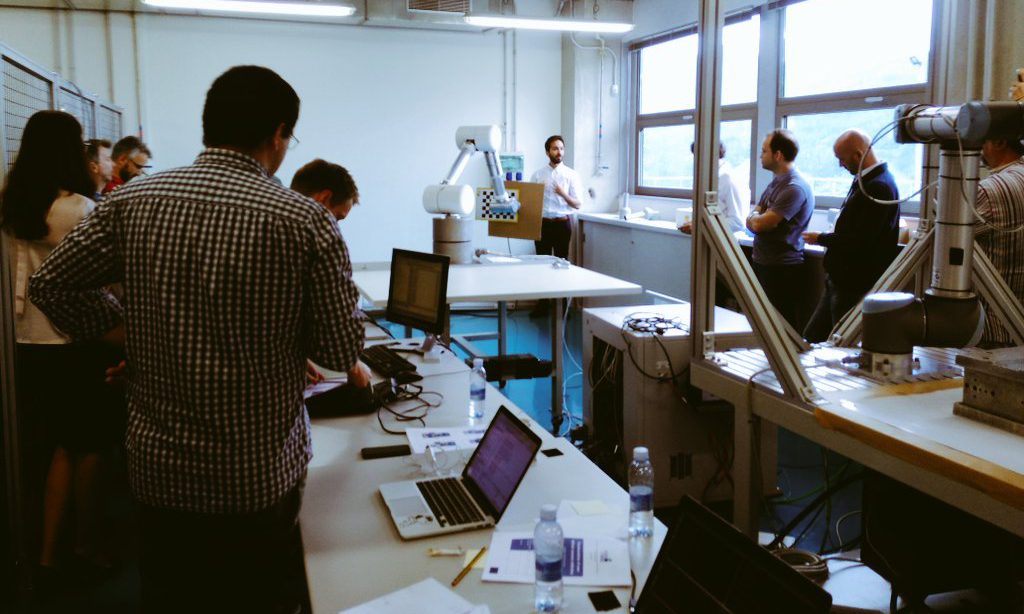
Last week, IK4-TEKNIKER hosted an Integration Camp and Plenary Meeting of the FourByThree consortium. During the Integration Camp the main components developed in the project by different partners were tested and integrated.
These include the new actuators (DFKI) and arm design (ZeMA), overall architecture (IK4-TEKNIKER), dynamic calibration (CNR-ITIA), low and medium level control (CNR-ITIA), programming language (IK4-TEKNIKER), dynamic task planning (CNR-ISTC), impedance control (CNR-ITIA), new functionalities of the projection system (IFF), variable stiffness (KCL and QMUL), ergonomics (KCL and QMUL) and graphical user interface (IK4-TEKNIKER).
The integrated components were successfully tested using two different FourByThree robot prototypes (6 DoF and 5 DoF) as well as a commercial robot.
 For the plenary meeting, partners were joined by representatives from the rest of the consortium, including Komat, Alfa, Prosumerlab, STODT, GTR and Deltatron.
For the plenary meeting, partners were joined by representatives from the rest of the consortium, including Komat, Alfa, Prosumerlab, STODT, GTR and Deltatron.
The next step will be the development and validation of the applications that will be used in the four Pilot Studies. Video footage of the integration works will soon be published in our project’s website.